特斯拉自动驾驶靠谱吗?特斯拉事故频发,很多人都开始产生质疑。其实,特斯拉使用的自动驾驶技术方案,的确不是目前行业中最安全的技术方案,按特斯拉自己的话说,这是平衡其成本和独特算法能力后的最优方案。但到底是不是“最优”,似乎特斯拉的用户们正在不断交出答卷。
特斯拉FSD Beta 9与其他厂商的自动驾驶方案,最大的区别在于——特斯拉仅需“摄像头+AI算法”,就能完成“自动驾驶”。
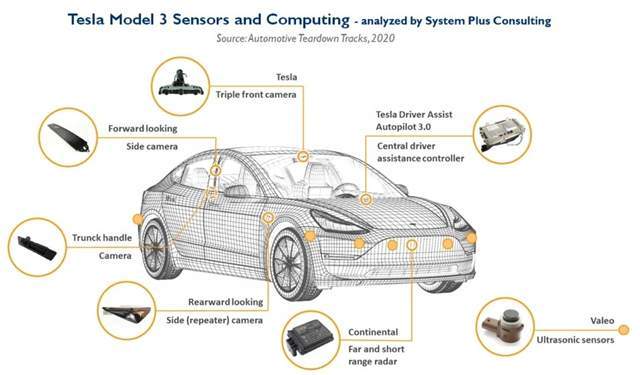
据了解,Model 3、Model Y、Model S以及Model X在内的所有特斯拉车型,都在同样的位置安装了8个摄像头,它们分别布置在前翼子板左右两侧、B柱左右两侧、正后方,以及前挡风玻璃上方。马斯克曾提出过一个重要的观点,他相信特斯拉汽车“仅通过改进软件即可实现L5级自动驾驶”。 回顾一下,特斯拉曾不断地为汽车做减法:大幅降低车辆线束长度、大幅减少车身零部件数量、大幅压缩生产制造工序。现如今,连毫米波雷达都要被特斯拉所抛弃。
对比一下其他国内热捧的自动驾驶大厂,他们都不断的在为汽车做加法,都采用了“激光雷达+高精地图”的技术路线,往L4级自动驾驶迈进。就算是现阶段较成熟的L2级辅助驾驶,也会采用“摄像头+雷达”的硬件配置。
其实各种传感器均有自己的局限性,目前业内比较主流的传感器,包括摄像头、激光雷达、毫米波雷达、超声波雷达。车企或自动驾驶集成方在应用场景和系统功能设计的过程中,需要充分考虑功能安全冗余,通过足够可靠的传感器方案,配合可靠的算法、以及计算和执行单元,来保障整体系统的功能安全。
就比如,纯视觉感知所采用的摄像头,成本低,可以识别不同的物体,在物体高度与宽度测量精度、车道线识别、行人识别准确度等方面有优势,是实现车道偏离预警、交通标志识别等功能不可缺少的传感器。
但是,摄像头有两个致命缺点:一是作用距离和测距精度不如毫米波雷达。二是容易受光照、天气等因素的影响。而毫米波雷达则恰好可以弥补,但毫米波雷达不能成像,所以难以识别车道线、交通标志等元素。所以两者,需要相互配合。
据悉,特斯拉美国工厂已从5月份开始生产不搭载毫米波雷达的Model 3和Model Y车型,这意味着,特斯拉的自动驾驶,仅通过基于摄像头的视觉技术实现定位,所以特斯拉的三维环境感知能力,是来自于二维图像信息的转换,这其中必然有信息丢失。其实,在此前的自动驾驶事故中,特斯拉对远处的物体有误识别的情况,时有发生。即便如此,特斯拉仍然选择成为目前全球唯一一家,只使用摄像头和超声波传感器实现L2级自动驾驶的车企,这是他们基于成本等因素综合考虑后做下的决定,相比之下,绝大多数企业会采用摄像头+毫米波雷达的融合方案,来实现L2级自动驾驶能力,更准确的说是ADAS辅助驾驶,比如自适应巡航、车道保持等功能。但其实,放弃成本不高的毫米波雷达几乎不可能有效降低最终成本,却失去了在雨雪、雾霾等天气干扰下准确探测距离的保障,能在关键时刻保命的自动紧急制动功能受到影响,可谓得不偿失。
之前有一些车主,连夜将特斯拉开到了各种困难场景下帮助特斯拉进行极端测试。比如环岛、路边停满车的窄路、大雾弥漫的夜晚等等。虽然特斯拉FSD Beta 9,凭借着超强的算法能力,仅用摄像头感知,就让车辆在城市道路进行自主的驾驶,但不过出现BUG的时候还是需要人类驾驶员去接管。比如网上的测试视频中,就出现了闯公交车专用道、在单行车道上逆行、压实线并线等情况,严重的还有径直冲向道路中央的绿植。
其实目前国内大多数厂商在做自动驾驶的时候,除了采用摄像头定位、雷达等相相对定位技术,还会辅以高精度定位+高精度地图的绝对定位技术。相比普通的地图,高精地图有什么优势?高精度GNSS定位呢?高精度GNSS定位加高精度地图又能实现智能驾驶辅助方面什么功能呢?去“北斗产业资讯平台”一探究竟吧
声明:该文观点仅代表作者本人,搜狐号系信息发布平台,搜狐仅提供信息存储空间服务。
