最近马斯克在最近一次电话会上表示,虽然目前没有和中国OEM厂商(整车制造企业)合作的机会,但特斯拉愿意向中国的企业们授权特斯拉的技术,包括充电技术以及FSD技术等。充电技术的授权吸引力应该不大,而FSD技术的授权,吸引力可能会更高。
智能驾驶技术的烧钱成都,非同小可,根本不亚于从零开始造一台车,华为余承东之前就表示过智能汽车解决方案一年就得投入十几亿美元。车企如果能直接获得智驾底层逻辑,等于省了一笔巨大的预算开支。这么来看,之后的汽车市场中,可能真的会出现多家智能驾驶方案供应商来给不同企业提供智驾方案。
那么,归根结底之后会是纯视觉、激光雷达之间的“战争”。
纯视觉和激光雷达,将会共存?


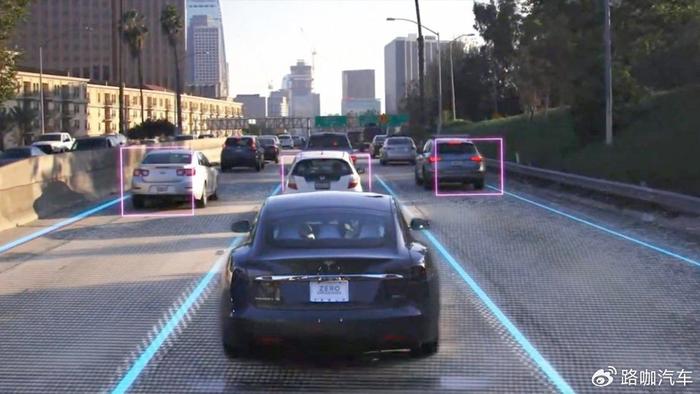
现在特斯拉坚持做的是纯视觉智能驾驶解决方案,以至于现在仍然有一部分人对纯视觉方案存有质疑,纯视觉方案到底能不能像激光雷达一样稳定可靠的工作,尤其是在L2和L3级别的辅助驾驶级别下。
特斯拉的FSD在更新V12版本之后,就已经开始使用上神经网络大模型功能,这是一个通过摄像头进行驾驶场景的收集,最后用大模型进行多批次的大批量深度学习,出现问题就继续多投喂同类型驾驶信息来进行深度学习,直至问题修复。在更新完成的V12版本的FSD智能驾驶功能中,可以完成城市NOA功能,并且完成度已经达到足够流畅的水平,起步、停车、跟车以及左右转弯的达成度都不错。
特斯拉这套FSD的底层逻辑,到了V12版本已经彻底改变了。
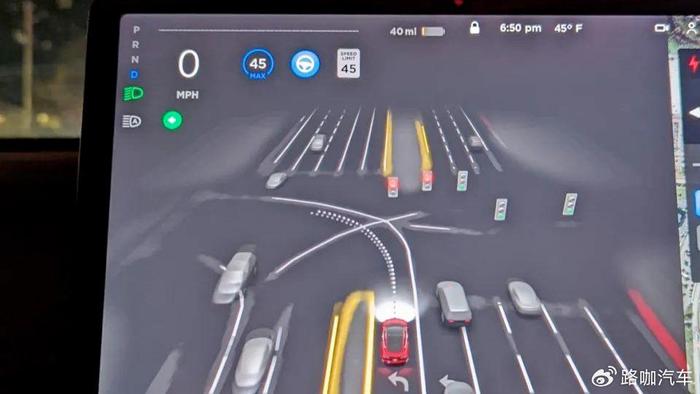
V12的FSD内核就是一个AI程序,其工作原理很简单。把车辆当前的摄像头画面拍摄下来,跟特斯拉积累的近万亿公里的历史行程数据进行比对,筛选出一些与当下场景很接近的场景数据。而当时特斯拉车主怎么操作的,FSD就怎么操作。
这种方式我们可以称之为,这是抄作业的原理,没有明确的固定条件以及规则限制;跳脱了之前诸多版本原有的思路,现在FSD没有任何预设条件,也没有对应规矩,FSD完全根据学习人类的经验来做判断。这个AI程序的工作变得非常简单,对硬件、算法要求直线下降,而且功耗也变低,但从实际的开车效果来看,已经非常接近于人类司机的驾驶效果。
而神经网络的好处,实现了从历史行驶数据端,到当前驾驶路况端的应用。

业内普遍共识,端到端的自动驾驶系统是理论上比现阶段模块化自动驾驶系统更高的能力上线,但目前尚未成为业界主流选择,为什么?原因,是端到端系统在提高模型能力上限的同时,也无限放大了神经网络黑盒不可解释的问题,而这种不可解释性就会给研发端与迭代问题带来巨大的负面影响,而且在特斯拉之前业内也没有端到端成功的先例,所以对于这种“尝鲜”的科技技术方案,绝大多数科技公司以及企业,并不敢贸然尝试。
神经网络时代下,还需要激光雷达吗?
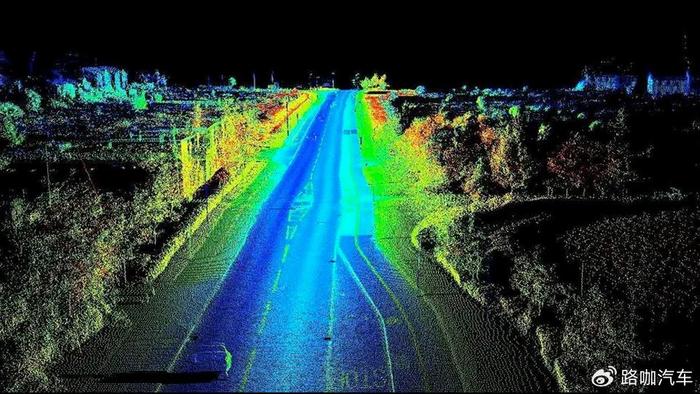
激光雷达能解决的问题,是远距离的探测能力与探测精度,识别率更高。这么推的话,在纯视觉方案足够成熟的前提下,也就是学习能力以及学习数据都达到极致的情况下,激光雷达的存在就不是必要的。
而在以上两个前提都没达成的情况下,激光雷达仍然有必要存在的。也就是说,纯视觉+神经网络与激光雷达解决方案的智能驾驶方案,将会共存一段时间。
装车门槛,要求高不高?
既然马斯克提出了这个想法,那未来一段时间内就可能会有装车的可能性。现阶段业内对于特斯拉FSD V12都比较期待,它是可以实现端到端能力的智能驾驶系统(并不是从A点开车到B点的意思),这一版本正是用彻底的端到端思路来实现高阶智驾的,就跟真人开车非常接近,输入图像视频,输出直接是转向、加速和制动的操作。
端到端是一个发展趋势。
现在有能力做端到端的企业,不少,但只是目前特斯拉FSD V12先做成了并且已经给用户推送了,所以现在智能驾驶这块的焦点都落在了FSD这个版本型号上。而类似的国内企业也有在做,毫末智行也在筹备神经网络的智能驾驶解决方案;华为ADS+GOD神经网络,都是与FSD类似的构建,甩掉了高精地图,奔着端到端去的。

用摄像头和激光雷达做类似的事,其实就理解成把摄像头收集到的视频数据,换成激光雷达收集到的点云数据一样看待,然后神经网络在大量的点云数据中做训练,最后也能实现端到端的操作。
后两者是激光雷达+摄像头的融合感知方案做的,因为激光雷达的成本虽然高,但好在精度和探测距离更好。这也是后两者在考虑到中国城市路况的复杂性,才考虑加入的激光雷达,毫末智行的方案和特斯拉FSD极为相似。
聊聊这类智能驾驶方案的上车难度。
想要做神经网络,首先应当具备超算中心,这是智能驾驶企业们的入门配置,目前的车企,包括特斯拉、吉利、蔚来、毫末智行、小鹏、理想等,都已经在搭建云端超算中心。这应该是对智能驾驶方案的提供者提出的必要要求,对使用着来说刚需性不是很强。
其次,现在特斯拉上面的FSD V12版本的算力需求,也就100TOPS左右(实车演示的是Model S(配置|询价),使用HW3.0芯片,算力只有144TOPS),现阶段智能驾驶实则对算力需求不用太高,L3-L4级别之后或许才会对算力有非常高的需求,数百TOPS级别等。
然后聊一个关键的问题,感知硬件的问题。
摄像头和激光雷达,都能成为这套感知方案的硬件,但什么因素能说明激光雷达在这套系统中的必要性?目前暂时没有条件可以证明在神经网络智能驾驶解决方案中,激光雷达的加入,能提高智驾的准确性、安全性等方面有何提高。

至少现阶段特斯拉FSD V12版本在演示过程中,做到了流畅、安全以及可靠的表现,虽然还会有人类接管操作,但这套低成本方案做到了如同激光雷达感知方案的水准。说白了,用上神经网络的智驾方案,在L2通往L3级别的过程中,不太吃感知硬件的实力,而更吃数据量和训练量;因为不用完全自动驾驶,所以对于感知硬件的性能要求并不极致。
而且FSD对于芯片算力也并不高,144TOPS都足够用了,就是不知道特斯拉是否会像华为一样,打包整套驾驶技术包括芯片技术;但要明确的,华为不造车可以整包提供,但特斯拉造车,或许还是会有一些技术上的保留,例如不会用上HW4.0芯片给其他授权企业?

特斯拉FSD进入国内或会面临一个环境适配的过程,但这个过程不会太复杂。等到FSD V12落地国内市场之后,好用程度决定了这套系统有没有其他厂家来用,上车难度不高,尤其是在硬件上的配置,低成本将是一个核心优势,尤其是相比那些重激光雷达感知的方案。
特斯拉的FSD,很可能是低价格车型快速落地智能驾驶的一条路,或许是最容易获得的智驾方案。
所以,到底是激光雷达更适用于中国城市的道路工况?如果FSD落地的使用效果仍然不错的话,那现在激光雷达方案的各位玩家,就是白忙活。